
Python读取图片属性信息的实现方法
admin
2023-08-01 20:03:04
0次
本文是利用Python脚本读取图片信息,有几个说明如下:
1、没有实现错误处理
2、没有读取所有信息,大概只有 GPS 信息、图片分辨率、图片像素、设备商、拍摄设备等
3、简单修改后应该能实现暴力修改图片的 GPS 信息
4、但对于本身没有 GPS 信息的图片,实现则非常复杂,需要仔细计算每个描述符的偏移量
脚本运行后,读取结果如下
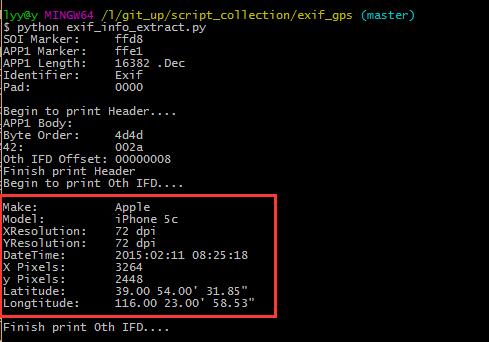
脚本读取的信息
这里和 Windows 属性查看器读到的内容完全一致

图片信息1
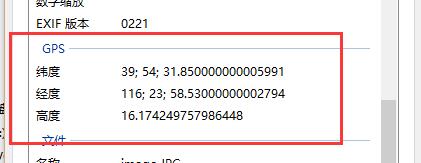
图片信息2
源码如下
# -*- coding:utf-8 -*-
import binascii
class ParseMethod(object):
@staticmethod
def parse_default(f, count, offset):
pass
@staticmethod
def parse_latitude(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
latitude = [0,0,0]
for i in xrange(count):
byte = f.read(4)
numerator = byte.encode(\'hex\')
byte = f.read(4)
denominator = byte.encode(\'hex\')
latitude[i] = float(int(numerator, 16)) / int(denominator, 16)
print \'Latitude:\\t%.2f %.2f\\\' %.2f\\\"\' % (latitude[0], latitude[1], latitude[2])
f.seek(old_pos)
@staticmethod
def parse_longtitude(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
longtitude = [0,0,0]
for i in xrange(count):
byte = f.read(4)
numerator = byte.encode(\'hex\')
byte = f.read(4)
denominator = byte.encode(\'hex\')
longtitude[i] = float(int(numerator, 16)) / int(denominator, 16)
print \'Longtitude:\\t%.2f %.2f\\\' %.2f\\\"\' % (longtitude[0], longtitude[1], longtitude[2])
f.seek(old_pos)
@staticmethod
def parse_make(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode(\'hex\')
print \'Make:\\t\\t\' + binascii.a2b_hex(a)
f.seek(old_pos)
@staticmethod
def parse_model(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode(\'hex\')
print \'Model:\\t\\t\' + binascii.a2b_hex(a)
f.seek(old_pos)
@staticmethod
def parse_datetime(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode(\'hex\')
print \'DateTime:\\t\' + binascii.a2b_hex(a)
f.seek(old_pos)
# rational data type, 05
@staticmethod
def parse_xresolution(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(4)
numerator = byte.encode(\'hex\')
byte = f.read(4)
denominator = byte.encode(\'hex\')
xre = int(numerator, 16) / int(denominator, 16)
print \'XResolution:\\t\' + str(xre) + \' dpi\'
f.seek(old_pos)
@staticmethod
def parse_yresolution(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(4)
numerator = byte.encode(\'hex\')
byte = f.read(4)
denominator = byte.encode(\'hex\')
xre = int(numerator, 16) / int(denominator, 16)
print \'YResolution:\\t\' + str(xre) + \' dpi\'
f.seek(old_pos)
@staticmethod
def parse_exif_ifd(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(2)
a = byte.encode(\'hex\')
exif_ifd_number = int(a, 16)
for i in xrange(exif_ifd_number):
byte = f.read(2)
tag_id = byte.encode(\'hex\')
#print tag_id,
byte = f.read(2)
type_n = byte.encode(\'hex\')
#print type_n,
byte = f.read(4)
count = byte.encode(\'hex\')
#print count,
byte = f.read(4)
value_offset = byte.encode(\'hex\')
#print value_offset
value_offset = int(value_offset, 16)
EXIF_IFD_DICT.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
f.seek(old_pos)
@staticmethod
def parse_x_pixel(f, count, value):
print \'X Pixels:\\t\' + str(value)
@staticmethod
def parse_y_pixel(f, count, value):
print \'y Pixels:\\t\' + str(value)
@staticmethod
def parse_gps_ifd(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(2)
a = byte.encode(\'hex\')
gps_ifd_number = int(a, 16)
for i in xrange(gps_ifd_number):
byte = f.read(2)
tag_id = byte.encode(\'hex\')
#print tag_id,
byte = f.read(2)
type_n = byte.encode(\'hex\')
#print type_n,
byte = f.read(4)
count = byte.encode(\'hex\')
#print count,
byte = f.read(4)
value_offset = byte.encode(\'hex\')
#print value_offset
count = int(count, 16)
value_offset = int(value_offset, 16)
GPS_IFD_DICT.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
f.seek(old_pos)
IFD_dict = {
\'010f\' : ParseMethod.parse_make ,
\'0110\' : ParseMethod.parse_model ,
\'0132\' : ParseMethod.parse_datetime ,
\'011a\' : ParseMethod.parse_xresolution ,
\'011b\' : ParseMethod.parse_yresolution ,
\'8769\' : ParseMethod.parse_exif_ifd ,
\'8825\' : ParseMethod.parse_gps_ifd
}
EXIF_IFD_DICT = {
\'a002\' : ParseMethod.parse_x_pixel ,
\'a003\' : ParseMethod.parse_y_pixel
}
GPS_IFD_DICT = {
\'0002\' : ParseMethod.parse_latitude ,
\'0004\' : ParseMethod.parse_longtitude
}
with open(\'image.jpg\', \'rb\') as f:
byte = f.read(2)
a = byte.encode(\'hex\')
print \'SOI Marker:\\t\' + a
byte = f.read(2)
a = byte.encode(\'hex\')
print \'APP1 Marker:\\t\' + a
byte = f.read(2)
a = byte.encode(\'hex\')
print \'APP1 Length:\\t\' + str(int(a, 16)) + \' .Dec\'
byte = f.read(4)
a = byte.encode(\'hex\')
print \'Identifier:\\t\' + binascii.a2b_hex(a)
byte = f.read(2)
a = byte.encode(\'hex\')
print \'Pad:\\t\\t\' + a
print
print \'Begin to print Header.... \'
print \'APP1 Body: \'
byte = f.read(2)
a = byte.encode(\'hex\')
print \'Byte Order:\\t\' + a
byte = f.read(2)
a = byte.encode(\'hex\')
print \'42:\\t\\t\' + a
byte = f.read(4)
a = byte.encode(\'hex\')
print \'0th IFD Offset:\\t\' + a
print \'Finish print Header\'
print \'Begin to print 0th IFD....\'
print
#print \'Total: \',
byte = f.read(2)
a = byte.encode(\'hex\')
interoperability_number = int(a, 16)
#print interoperability_number
for i in xrange(interoperability_number):
byte = f.read(2)
tag_id = byte.encode(\'hex\')
#print tag_id,
byte = f.read(2)
type_n = byte.encode(\'hex\')
#print type_n,
byte = f.read(4)
count = byte.encode(\'hex\')
#print count,
byte = f.read(4)
value_offset = byte.encode(\'hex\')
#print value_offset
count = int(count, 16)
value_offset = int(value_offset, 16)
# simulate switch
IFD_dict.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
print
print \'Finish print 0th IFD....\'
总结
利用Python读取图片属性信息的实现方法到这就基本结束了,大家都学会了吗?希望这篇文章对大家的学习或者工作带来一定的帮助,
相关内容
热门资讯
500 行 Python 代码...
语法分析器描述了一个句子的语法结构,用来帮助其他的应用进行推理。自然语言引入了很多意外的歧义,以我们...
定时清理删除C:\Progra...
C:\Program Files (x86)下面很多scoped_dir开头的文件夹 写个批处理 定...
65536是2的几次方 计算2...
65536是2的16次方:65536=2⁶
65536是256的2次方:65536=256
6553...
Mobi、epub格式电子书如...
在wps里全局设置里有一个文件关联,打开,勾选电子书文件选项就可以了。
scoped_dir32_70...
一台虚拟机C盘总是莫名奇妙的空间用完,导致很多软件没法再运行。经过仔细检查发现是C:\Program...
pycparser 是一个用...
`pycparser` 是一个用 Python 编写的 C 语言解析器。它可以用来解析 C 代码并构...
小程序支付时提示:appid和...
[Q]小程序支付时提示:appid和mch_id不匹配
[A]小程序和微信支付没有进行关联,访问“小...
Prometheus+Graf...
一,Prometheus概述
1,什么是Prometheus?Prometheus是最初在Sound...
python绘图库Matplo...
本文简单介绍了Python绘图库Matplotlib的安装,简介如下:
matplotlib是pyt...
微信小程序使用slider实现...
众所周知哈,微信小程序里面的音频播放是没有进度条的,但最近有个项目呢,客户要求音频要有进度条控制,所...